hurlex <八> 完成中断请求和定时器中断
在上一章中我们完成了中断处理程序的框架,本章在其基础上讨论中断请求的实现。
我们在上一章中提到,外设的所有中断由中断控制芯片8259A统一汇集之后连接到CPU的INTR引脚。1这章我们就来探究8259APIC的初始化和实现定时器的中断处理。
8259A PIC每一片可以管理8个中断源,显然一般情况下设备数量会超过这个值。这里就要提到IBM PC/AT 8259A PIC架构了,IBM的设计方案是使用8259APIC的级联功能,使用两片级联(分为主、从片)的方式来管理硬件中断。其中主片的INT端连接到CPU的INTR引脚,从片的INT连接到主片的IR2引脚。结构如下图所示:
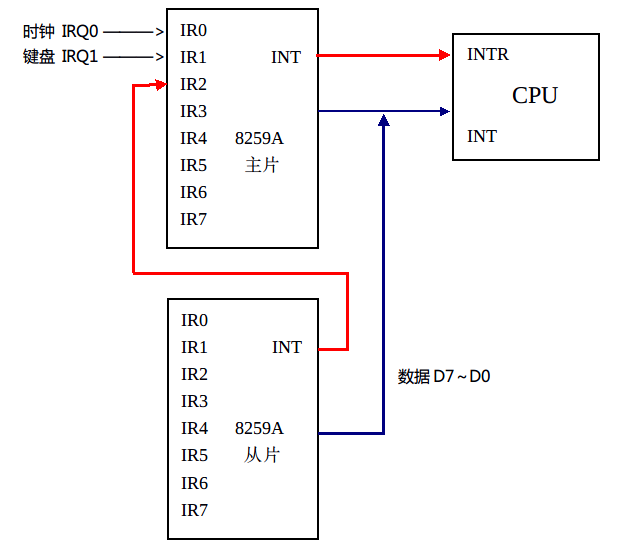
图中时钟中断连接在主片的IRQ0引脚,键盘中断连接在了主片的IRQ1引脚。其它的引脚暂时用不到就不说了。在上一张描述中断描述符表时我们知道了0~31号中断是CPU使用和保留的,用户可以使用的中断从32号开始。所以这里的IRQ0对应的中断号就是32号,IRQ1就是33号,然后以此类推。
理论就暂时阐述到这里,接下来是实现代码。首先是对8259A PIC的初始化,在设置中断描述符表的函数init_idt最前面加入如下代码:
// 初始化中断描述符表
void init_idt()
{
// 重新映射 IRQ 表
// 两片级联的 Intel 8259A 芯片
// 主片端口 0x20 0x21
// 从片端口 0xA0 0xA1
// 初始化主片、从片
// 0001 0001
outb(0x20, 0x11);
outb(0xA0, 0x11);
// 设置主片 IRQ 从 0x20(32) 号中断开始
outb(0x21, 0x20);
// 设置从片 IRQ 从 0x28(40) 号中断开始
outb(0xA1, 0x28);
// 设置主片 IR2 引脚连接从片
outb(0x21, 0x04);
// 告诉从片输出引脚和主片 IR2 号相连
outb(0xA1, 0x02);
// 设置主片和从片按照 8086 的方式工作
outb(0x21, 0x01);
outb(0xA1, 0x01);
// 设置主从片允许中断
outb(0x21, 0x0);
outb(0xA1, 0x0);
... ...
}
对8259A PIC具体的设置我们不再阐述,这种资料网上铺天盖地的都是。相信结合注释很容易理解这个简单的初始化过程。
完成了初始化之后,我们继续添加对IRQ处理函数的添加。首先是在idt.h头文件末尾添加如下内容:
// IRQ 处理函数
void irq_handler(pt_regs *regs);
// 定义IRQ
#define IRQ0 32 // 电脑系统计时器
#define IRQ1 33 // 键盘
#define IRQ2 34 // 与 IRQ9 相接,MPU-401 MD 使用
#define IRQ3 35 // 串口设备
#define IRQ4 36 // 串口设备
#define IRQ5 37 // 建议声卡使用
#define IRQ6 38 // 软驱传输控制使用
#define IRQ7 39 // 打印机传输控制使用
#define IRQ8 40 // 即时时钟
#define IRQ9 41 // 与 IRQ2 相接,可设定给其他硬件
#define IRQ10 42 // 建议网卡使用
#define IRQ11 43 // 建议 AGP 显卡使用
#define IRQ12 44 // 接 PS/2 鼠标,也可设定给其他硬件
#define IRQ13 45 // 协处理器使用
#define IRQ14 46 // IDE0 传输控制使用
#define IRQ15 47 // IDE1 传输控制使用
// 声明 IRQ 函数
// IRQ:中断请求(Interrupt Request)
void irq0(); // 电脑系统计时器
void irq1(); // 键盘
void irq2(); // 与 IRQ9 相接,MPU-401 MD 使用
void irq3(); // 串口设备
void irq4(); // 串口设备
void irq5(); // 建议声卡使用
void irq6(); // 软驱传输控制使用
void irq7(); // 打印机传输控制使用
void irq8(); // 即时时钟
void irq9(); // 与 IRQ2 相接,可设定给其他硬件
void irq10(); // 建议网卡使用
void irq11(); // 建议 AGP 显卡使用
void irq12(); // 接 PS/2 鼠标,也可设定给其他硬件
void irq13(); // 协处理器使用
void irq14(); // IDE0 传输控制使用
void irq15(); // IDE1 传输控制使用
然后是idt_s.s中添加相应的处理过程:
; 构造中断请求的宏
%macro IRQ 2
[GLOBAL irq%1]
irq%1:
cli
push byte 0
push byte %2
jmp irq_common_stub
%endmacro
IRQ 0, 32 ; 电脑系统计时器
IRQ 1, 33 ; 键盘
IRQ 2, 34 ; 与 IRQ9 相接,MPU-401 MD 使用
IRQ 3, 35 ; 串口设备
IRQ 4, 36 ; 串口设备
IRQ 5, 37 ; 建议声卡使用
IRQ 6, 38 ; 软驱传输控制使用
IRQ 7, 39 ; 打印机传输控制使用
IRQ 8, 40 ; 即时时钟
IRQ 9, 41 ; 与 IRQ2 相接,可设定给其他硬件
IRQ 10, 42 ; 建议网卡使用
IRQ 11, 43 ; 建议 AGP 显卡使用
IRQ 12, 44 ; 接 PS/2 鼠标,也可设定给其他硬件
IRQ 13, 45 ; 协处理器使用
IRQ 14, 46 ; IDE0 传输控制使用
IRQ 15, 47 ; IDE1 传输控制使用
[GLOBAL irq_common_stub]
[EXTERN irq_handler]
irq_common_stub:
pusha ; pushes edi, esi, ebp, esp, ebx, edx, ecx, eax
mov ax, ds
push eax ; 保存数据段描述符
mov ax, 0x10 ; 加载内核数据段描述符
mov ds, ax
mov es, ax
mov fs, ax
mov gs, ax
mov ss, ax
push esp
call irq_handler
add esp, 4
pop ebx ; 恢复原来的数据段描述符
mov ds, bx
mov es, bx
mov fs, bx
mov gs, bx
mov ss, bx
popa ; Pops edi,esi,ebp...
add esp, 8 ; 清理压栈的 错误代码 和 ISR 编号
iret ; 出栈 CS, EIP, EFLAGS, SS, ESP
.end:
最后是init_idt函数构造IRQ的相关描述符和具体的IRQ处理函数了。
// 初始化中断描述符表
void init_idt()
{
... ...
idt_set_gate(31, (uint32_t)isr31, 0x08, 0x8E);
idt_set_gate(32, (uint32_t)irq0, 0x08, 0x8E);
idt_set_gate(33, (uint32_t)irq1, 0x08, 0x8E);
idt_set_gate(34, (uint32_t)irq2, 0x08, 0x8E);
idt_set_gate(35, (uint32_t)irq3, 0x08, 0x8E);
idt_set_gate(36, (uint32_t)irq4, 0x08, 0x8E);
idt_set_gate(37, (uint32_t)irq5, 0x08, 0x8E);
idt_set_gate(38, (uint32_t)irq6, 0x08, 0x8E);
idt_set_gate(39, (uint32_t)irq7, 0x08, 0x8E);
idt_set_gate(40, (uint32_t)irq8, 0x08, 0x8E);
idt_set_gate(41, (uint32_t)irq9, 0x08, 0x8E);
idt_set_gate(42, (uint32_t)irq10, 0x08, 0x8E);
idt_set_gate(43, (uint32_t)irq11, 0x08, 0x8E);
idt_set_gate(44, (uint32_t)irq12, 0x08, 0x8E);
idt_set_gate(45, (uint32_t)irq13, 0x08, 0x8E);
idt_set_gate(46, (uint32_t)irq14, 0x08, 0x8E);
idt_set_gate(47, (uint32_t)irq15, 0x08, 0x8E);
// 255 将来用于实现系统调用
idt_set_gate(255, (uint32_t)isr255, 0x08, 0x8E);
... ...
}
// IRQ 处理函数
void irq_handler(pt_regs *regs)
{
// 发送中断结束信号给 PICs
// 按照我们的设置,从 32 号中断起为用户自定义中断
// 因为单片的 Intel 8259A 芯片只能处理 8 级中断
// 故大于等于 40 的中断号是由从片处理的
if (regs->int_no >= 40) {
// 发送重设信号给从片
outb(0xA0, 0x20);
}
// 发送重设信号给主片
outb(0x20, 0x20);
if (interrupt_handlers[regs->int_no]) {
interrupt_handlers[regs->int_no](regs);
}
}
结合代码中详细的注释和本章开始的8259A PIC的结构图,详细很容易理解这个处理过程。其实IRQ和ISR的处理过程很类似:
-
ISR的处理过程是 (isr0 - isr31) -> isr_common_stub -> isr_handler -> 具体的ISR处理函数。
-
IRQ的处理过程是 (irq0 - irq15) -> irq_common_stub -> irq_hanlder -> 具体的IRQ处理函数。
写到这里具体的IRQ处理过程就完成了,以后只需要设置好相应的处理函数就好了,接下来我们实现时钟中断的产生和处理。
时钟中断对于操作系统内核来说很重要的一种中断,它使得CPU无论在执行任何用户或者内核的程序时,都能定义的将执行权利交还到CPU手中来。2除了记录时间之外,时钟中断的处理函数里通常都是对进程的调度处理。
具体的时钟中断源是8253/8254 Timer产成的,要按照需要的频率产生中断,需要先配置8253/8254 Timer芯片。代码如下:
#include "timer.h"
#include "debug.h"
#include "common.h"
#include "idt.h"
void timer_callback(pt_regs *regs)
{
static uint32_t tick = 0;
printk_color(rc_black, rc_red, "Tick: %d\n", tick++);
}
void init_timer(uint32_t frequency)
{
// 注册时间相关的处理函数
register_interrupt_handler(IRQ0, timer_callback);
// Intel 8253/8254 PIT芯片 I/O端口地址范围是40h~43h
// 输入频率为 1193180,frequency 即每秒中断次数
uint32_t divisor = 1193180 / frequency;
// D7 D6 D5 D4 D3 D2 D1 D0
// 0 0 1 1 0 1 1 0
// 即就是 36 H
// 设置 8253/8254 芯片工作在模式 3 下
outb(0x43, 0x36);
// 拆分低字节和高字节
uint8_t low = (uint8_t)(divisor & 0xFF);
uint8_t hign = (uint8_t)((divisor >> 8) & 0xFF);
// 分别写入低字节和高字节
outb(0x40, low);
outb(0x40, hign);
}
对应的头文件如下:
#ifndef INCLUDE_TIMER_H_
#define INCLUDE_TIMER_H_
#include "types.h"
void init_timer(uint32_t frequency);
#endif // INCLUDE_TIMER_H_
8253/8254 Timer有三种工作模式,我们使用第三种。init_timer函数的参数是所需的时钟中断的频率,具体的设置原理不再赘述。最后,修改入口函数进行测试:
#include "console.h"
#include "debug.h"
#include "gdt.h"
#include "idt.h"
#include "timer.h"
int kern_entry()
{
init_debug();
init_gdt();
init_idt();
console_clear();
printk_color(rc_black, rc_green, "Hello, OS kernel!\n");
init_timer(200);
// 开启中断
asm volatile ("sti");
return 0;
}
最后编译执行,我们看到了如下的输出: